 FAQ
FAQ
 majorbitdev
17.01.25
majorbitdev
17.01.25
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор —
устройство в управляющем контуре с обратной связью (Обратная_связь_(техника)). Используется в системах автоматического управления (Система_управления) для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса
Основные составляющие:
Р или Пропорциональная составляющая
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемого в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю.
I или Интегрирующая составляющая.
Интегрирующая составляющая пропорциональна интегралу по времени от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку.
D или Дифференцирующая составляющая
Дифференцирующая составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
Теперь очень упрощенно как это работает в полетном контроллере:
- Полетный контроллер знает о двух наборах пространственных координат.
- Первый набор это его собственное положение в пространстве по трем осям, крен, тангаж и рыскание(roll, pitch, yaw)
- Второй набор, это так называемое целевое значение положения (set point)
Мы двигая стики, управляем не моторами напрямую, мы изменяем целевое значение(далее set point)
После чего, полетник, используя алгоритмы пид-регулятора, изменяя частоту вращения моторов(на коптере и отклоняет рулевые поверхности на самолете) старается сделать так, чтобы координаты пространственного положения его самого, совпали с заданным set point.
PID-регулятор тут отвечает за то какое приложить усилие для изменения положения(за это отвечает Р компонента), как интенсивно снизить/компенсировать усилие чтобы не проскочить целевое значение (за это отвечает D компонента) и в дальнейшем регулировать усилия сохраняя целевое положение ( за это отвечает уже i компонента)
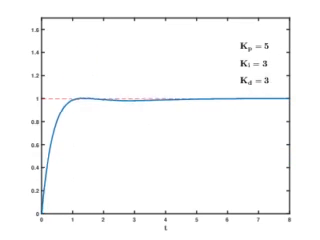
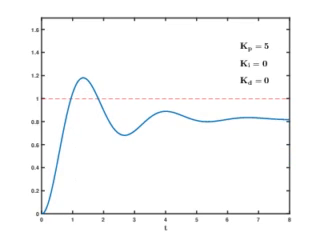
Визуально это можно представить так:
Где 1 по оси Y является целевым значением положения, а график отображает процесс достижения целевого значение при изменении переменных pid- регулятора
Обсудить можно тут https://t.me/rcFAQtalks/2
#pid #пид #настройка
